Coastline Evolution & Nearshore Approximation (CENA)
CENA is an Artificial Intelligence (AI) engine uniquely designed to evaluate various remotely sensed data sources to determine and apply the best applicable modeling solution. CENA then uses those models to automatically generate software that can best meet a client’s specific nearshore bathymetry needs. Because CENA’s architecture is trained to understand a variety of scientifically-derived methods, the generated software can be tailored to various coastlines and varying environmental conditions.
A novel feature within CENA’s AI architecture is its ability to rapidly evolve and generate software updates as new scientific-derived techniques are discovered. Both breadth and depth of model development are addressed in the agile architecture, as the most relevant scientific methodologies can be applied to a large area with significantly less time and resources than is usually required to manually classify and develop new models.
PolArctic built and incorporated several different scientific techniques into models that each independently provide estimates for bathymetry. A few of them are highlighted below!
Intertidal Zone and Coastal Change
We started our work at the intertidal zone, the area of the coast between the high and low tide. It is one of the areas with the most active change, and where coastal erosion begins impacting people. It is also a location that can be seen directly during certain times of the tidal cycle by satellites. In these images you can see we are zooming in to the city of Homer, Alaska where we mapped intertidal elevation. The bottom two figures show a zoomed in version of the resulting intertidal bathymetry and a helicopter view of that location in Homer at low tide.
Southern Alaska experiences a massive tidal range and the coast is largely made up of mudflats, which are beaches made from glacial silt. We have built new AI classifiers that can recognize the difference between a mudflat and very turbid water and identify the water’s edge. To map the intertidal zone we conducted waterline mapping by matching tidal elevation with shoreline edge detection using ML classification



Coastal change is evident between 2018 and 2019. Here, elevation is shown in meters and 0 approximates Mean Sea Level.
Wave Inversion
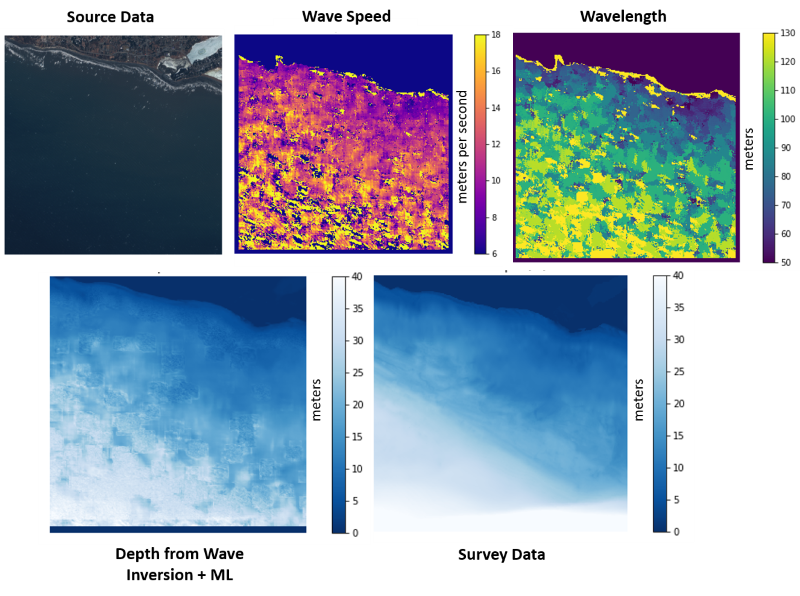
Our current work uses the science of oceanography to extract features that would otherwise be hidden, literally under the waves of the ocean. Using advanced remote sensing techniques, we detect waves and apply mathematical formulas that infer water depth from wave patterns. We use these as feature inputs into a machine learning (ML) algorithm, and train on a small part of a beach that has been mapped. Using this technique we can reduce the time and resources needed for coastal mapping, and frequently monitor locations with high rates of erosion.
SATELLITE DERIVED BATHYMETRY
In the subtidal zone, we employ a technique known as satellite derived bathymetry (SDB). This method exploits the physics of light scattering in the atmosphere and water column that is apparent in remotely sensed imagery. In places like Homer, lots of mud is commonly suspended in the water making it very turbid or cloudy, and the SDB method breaks down. SDB performs best in clear waters, emphasizing the need for a diverse set of methods and AI augmentation (CENA!) at sites like Homer, Alaska.

In portions of the upper panel, the subtidal seafloor is visible through the water column. In the SDB Prediction panel, the white areas show where this method failed. In this case, the bottom was too dark and sufficient light was not reflected back to estimate water depth.